What is Hard Platooning?
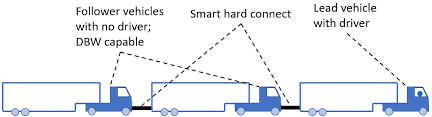
Hard Platooning is a technology that links multiple military vehicles together using a physical connection called the Hard Connect product. Unlike traditional Leader-Follower (LF) systems, where robotic vehicles follow a human-driven or remotely operated lead vehicle using wireless communication, Hard Platooning uses a physical tether. This setup allows one person to control multiple vehicles at the same time, reducing the workload for soldiers and improving coordination.
Why is Hard Platooning needed?
Hard platooning provides benefits for the U.S. Military, transit systems, and the trucking industry by making transportation safer, more reliable, and more efficient. Transit agencies, which prioritize safety around pedestrians and cyclists, struggle to adopt fully autonomous vehicles due to safety concerns. This new system uses a human-driven lead vehicle with automated followers connected by a smart physical tether, solving these worries. This technology can solve labor shortages and boost productivity, without compromising safety for the trucking industry. For the military, this technology can enhance path tracking, and expand ground vehicle capabilities. Unlike fully autonomous vehicles, this system uses the driver to bypass unpredictable obstacles, like bad weather and cybersecurity risks. The tether will transmit data between vehicles, ensuring they can follow the same path without needing changes to infrastructure.
What is CAST doing to improve Hard Platooning?
Current work involves analysis of system dynamics, development of nonlinear control strategies and full-scale experimentation on both class 8 trucks and transit buses.
David “DJ” Franklin, Michiel Ashley, Matthew Hancock